![]()
Py-ART Basics with Xradar¶
Overview¶
Within this notebook, we will cover:
General overview of Py-ART and its functionality
Reading data using Py-ART
An overview of the
pyart.RadarobjectCreate a Plot of our Radar Data
Prerequisites¶
| Concepts | Importance | Notes |
|---|---|---|
| Intro to Cartopy | Helpful | Basic features |
| Weather Radar Basics | Helpful | Background Information |
| Matplotlib Basics | Helpful | Basic plotting |
| NumPy Basics | Helpful | Basic arrays |
| Xarray Basics | Helpful | Multi-dimensional arrays |
Time to learn: 45 minutes
Imports¶
import os
import warnings
import cartopy.crs as ccrs
import matplotlib.pyplot as plt
import pyart
from pyart.testing import get_test_data
import xradar as xd
warnings.filterwarnings("ignore")An Overview of Py-ART¶
History of the Py-ART¶
Development began to address the needs of ARM with the acquisition of a number of new scanning cloud and precipitation radar as part of the American Recovery Act.
The project has since expanded to work with a variety of weather radars and a wider user base including radar researchers and climate modelers.
The software has been released on GitHub as open source software under a BSD license. Runs on Linux, OS X. It also runs on Windows with more limited functionality.
What can Py-ART Do?¶
Py-ART can be used for a variety of tasks from basic plotting to more complex processing pipelines. Specific uses for Py-ART include:
pyart.io Module for reading radar data in a variety of file formats.
pyart.graph Module for creating plots and visualization of radar data.
pyart.correct Module for correcting radar moments while in antenna coordinates, such as:
Doppler unfolding/de-aliasing.
Attenuation correction.
Phase processing using a Linear Programming method.
pyart.map Mapping data from one or multiple radars onto a Cartesian grid.
pyart.retrieve Performing retrievals.
pyart
.io .write _cfradial Writing radial and Cartesian data to NetCDF files.
Py-ART 2.0¶
Py-ART 2.0 offers the option to use xradar for reading weather radar data into the xarray data model. Py-ART 2.0 also supports cmweather, a new package dedicated to supporting color vision deficiency (CVD) friendly colormaps. Please check the linked documentation to view all the changes within Py-ART 2.0.
Reading in Data Using Py-ART and xradar¶
Reading data in using xradar.io.open_¶
When reading in a radar file, we use the xradar.io module.
xradar.io can read a variety of different radar formats, such as Cf/Radial, ODIM_H5, etc.
The documentation on what formats can be read by xradar can be found here:
Let’s take a look at one of these readers:
?xd.io.open_cfradial1_datatreeSignature: xd.io.open_cfradial1_datatree(filename_or_obj, **kwargs)
Docstring:
Open CfRadial1 dataset as :py:class:`datatree.DataTree`.
Parameters
----------
filename_or_obj : str, Path, file-like or xarray.DataStore
Strings and Path objects are interpreted as a path to a local or remote
radar file
Keyword Arguments
-----------------
sweep : int, list of int, optional
Sweep number(s) to extract, default to first sweep. If None, all sweeps are
extracted into a list.
first_dim : str
Can be ``time`` or ``auto`` first dimension. If set to ``auto``,
first dimension will be either ``azimuth`` or ``elevation`` depending on
type of sweep. Defaults to ``auto``.
reindex_angle : bool or dict
Defaults to False, no reindexing. Given dict should contain the kwargs to
reindex_angle. Only invoked if `decode_coord=True`.
fix_second_angle : bool
If True, fixes erroneous second angle data. Defaults to ``False``.
optional : bool
Import optional mandatory data and metadata, defaults to ``True``.
site_coords : bool
Attach radar site-coordinates to Dataset, defaults to ``True``.
engine: str
Engine that will be passed to Xarray.open_dataset, defaults to "netcdf4"
Returns
-------
dtree: datatree.DataTree
DataTree with CfRadial2 groups.
File: /opt/conda/lib/python3.11/site-packages/xradar/io/backends/cfradial1.py
Type: functionLet’s use a sample data file from pyart - which is cfradial format.
When we read this in, we get a xarray.DataTree object that bundles the different radar sweeps into one structure!
file = "/data/project/ARM_Summer_School_2025/radar/csapr2/ppi/bnfcsapr2cfrS3.a1.20250315.190050.nc"
dt = xd.io.open_cfradial1_datatree(file)
dtInvestigate the xradar object¶
Within this xradar object object are the actual data fields, each stored in a different group, mimicking the FM301/cfradial2 data standard.
This is where data such as reflectivity and velocity are stored.
To see what fields are present we can add the fields and keys additions to the variable where the radar object is stored.
dt["sweep_0"]Extract a sample data field¶
The fields are stored in a dictionary, each containing coordinates, units and more. All can be accessed by just adding the fields addition to the radar object variable.
For an individual field, we add a string in brackets after the fields addition to see the contents of that field.
Let’s take a look at 'corrected_reflectivity_horizontal', which is a common field to investigate.
print(dt["sweep_0"]["uncorrected_reflectivity_h"])<xarray.DataArray 'uncorrected_reflectivity_h' (azimuth: 360, range: 1100)> Size: 2MB
[396000 values with dtype=float32]
Coordinates:
time (azimuth) datetime64[ns] 3kB 2025-03-15T00:00:13.781999 ... 20...
* range (range) float32 4kB 0.0 100.0 200.0 ... 1.098e+05 1.099e+05
* azimuth (azimuth) float32 1kB 0.5219 1.544 2.554 ... 357.5 358.6 359.5
elevation (azimuth) float32 1kB ...
latitude float32 4B ...
longitude float32 4B ...
altitude float32 4B ...
Attributes:
long_name: Uncorrected Reflectivity, Horizontal Channel
units: dBZ
standard_name: equivalent_reflectivity_factor
unpacking_details: Can be unpacked as follows: multiply packed values by...
We can go even further in the dictionary and access the actual reflectivity data.
We use add .data at the end, which will extract the data array (which is a numpy array) from the dictionary.
reflectivity = dt["sweep_0"]["uncorrected_reflectivity_h"].data
print(type(reflectivity), reflectivity)<class 'numpy.ndarray'> [[16.169746 12.304158 14.100647 ... 16.010887 15.720625 14.526235 ]
[12.296313 11.109768 11.001901 ... 12.617955 11.786393 11.502014 ]
[16.142288 10.931296 16.201126 ... 12.519894 14.834147 14.602722 ]
...
[15.406827 15.0596895 9.258366 ... 18.995882 20.555061 19.254765 ]
[11.7962 10.123268 12.527739 ... 19.594057 15.3224945 18.236885 ]
[14.712551 13.573075 14.082995 ... 12.149221 11.835424 10.58808 ]]
Lets’ check the size of this array...
reflectivity.shape(360, 1100)This reflectivity data array, numpy array, is a two-dimensional array with dimensions:
Range (distance away from the radar)
Azimuth (direction around the radar)
dt["sweep_0"].dimsFrozen({'azimuth': 360, 'range': 1100})If we wanted to look the 300th ray, at the second gate, we would use something like the following:
print(reflectivity[300, 2])12.888605
We can also select a specific azimuth if desired, using the xarray syntax:
dt["sweep_0"].sel(azimuth=180, method="nearest")Plotting our Radar Data¶
An Overview of Py-ART Plotting Utilities¶
Now that we have loaded the data and inspected it, the next logical thing to do is to visualize the data! Py-ART’s visualization functionality is done through the objects in the pyart.graph module.
In Py-ART there are 4 primary visualization classes in pyart.graph:
Plotting grid data
Use the RadarMapDisplay with our data¶
For the this example, we will be using RadarMapDisplay, using Cartopy to deal with geographic coordinates.
We start by creating a figure first, and adding our traditional radar methods to the xradar object.
fig = plt.figure(figsize=[10, 10])
radar = pyart.xradar.Xradar(dt)<Figure size 1000x1000 with 0 Axes>Once we have a figure, let’s add our RadarMapDisplay
fig = plt.figure(figsize=[10, 10])
display = pyart.graph.RadarMapDisplay(radar)<Figure size 1000x1000 with 0 Axes>Adding our map display without specifying a field to plot won’t do anything we need to specifically add a field to field using .plot_ppi_map()
display.plot_ppi_map("uncorrected_reflectivity_h")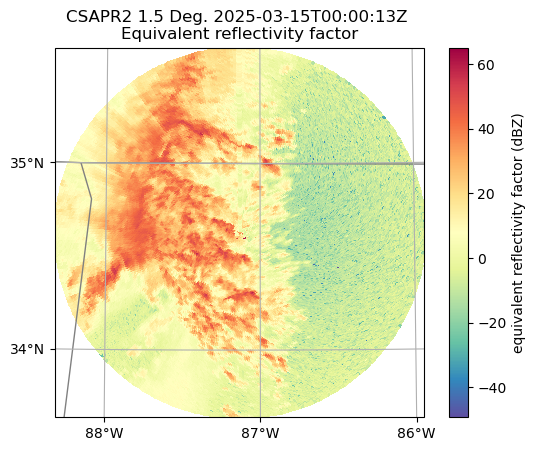
By default, it will plot the elevation scan, the the default colormap from Matplotlib... let’s customize!
We add the following arguements:
sweep=3- The fourth elevation scan (since we are using Python indexing)vmin=-20- Minimum value for our plotted field/colorbarvmax=60- Maximum value for our plotted field/colorbarprojection=ccrs.PlateCarree()- Cartopy latitude/longitude coordinate systemcmap='pyart_HomeyerRainbow'- Colormap to use, selecting one provided by PyART
fig = plt.figure(figsize=[12, 12])
display = pyart.graph.RadarMapDisplay(radar)
display.plot_ppi_map(
"uncorrected_reflectivity_h",
sweep=3,
vmin=-20,
vmax=60,
projection=ccrs.PlateCarree(),
cmap="HomeyerRainbow",
)
plt.show()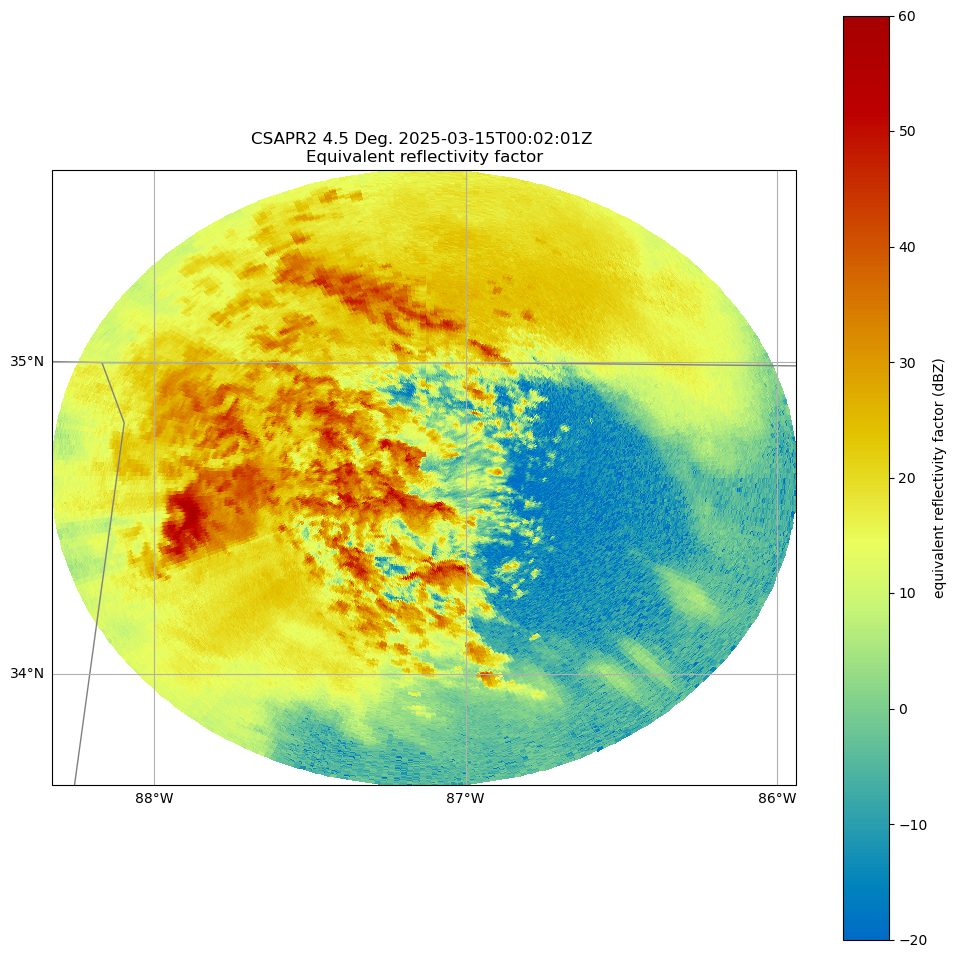
You can change many parameters in the graph by changing the arguments to plot_ppi_map. As you can recall from earlier. simply view these arguments in a Jupyter notebook by typing:
?display.plot_ppi_mapSignature:
display.plot_ppi_map(
field,
sweep=0,
mask_tuple=None,
vmin=None,
vmax=None,
cmap=None,
norm=None,
mask_outside=False,
title=None,
title_flag=True,
colorbar_flag=True,
colorbar_label=None,
colorbar_orient='vertical',
ax=None,
fig=None,
lat_lines=None,
lon_lines=None,
projection=None,
min_lon=None,
max_lon=None,
min_lat=None,
max_lat=None,
width=None,
height=None,
lon_0=None,
lat_0=None,
resolution='110m',
shapefile=None,
shapefile_kwargs=None,
edges=True,
gatefilter=None,
filter_transitions=True,
embellish=True,
add_grid_lines=True,
raster=False,
ticks=None,
ticklabs=None,
alpha=None,
edgecolors='face',
**kwargs,
)
Docstring:
Plot a PPI volume sweep onto a geographic map.
Parameters
----------
field : str
Field to plot.
sweep : int, optional
Sweep number to plot.
Other Parameters
----------------
mask_tuple : (str, float)
Tuple containing the field name and value below which to mask
field prior to plotting, for example to mask all data where
NCP < 0.5 set mask_tuple to ['NCP', 0.5]. None performs no masking.
vmin : float
Luminance minimum value, None for default value.
Parameter is ignored is norm is not None.
vmax : float
Luminance maximum value, None for default value.
Parameter is ignored is norm is not None.
norm : Normalize or None, optional
matplotlib Normalize instance used to scale luminance data. If not
None the vmax and vmin parameters are ignored. If None, vmin and
vmax are used for luminance scaling.
cmap : str or None
Matplotlib colormap name. None will use the default colormap for
the field being plotted as specified by the Py-ART configuration.
mask_outside : bool
True to mask data outside of vmin, vmax. False performs no
masking.
title : str
Title to label plot with, None to use default title generated from
the field and tilt parameters. Parameter is ignored if title_flag
is False.
title_flag : bool
True to add a title to the plot, False does not add a title.
colorbar_flag : bool
True to add a colorbar with label to the axis. False leaves off
the colorbar.
ticks : array
Colorbar custom tick label locations.
ticklabs : array
Colorbar custom tick labels.
colorbar_label : str
Colorbar label, None will use a default label generated from the
field information.
colorbar_orient : 'vertical' or 'horizontal'
Colorbar orientation.
ax : Cartopy GeoAxes instance
If None, create GeoAxes instance using other keyword info.
If provided, ax must have a Cartopy crs projection and projection
kwarg below is ignored.
fig : Figure
Figure to add the colorbar to. None will use the current figure.
lat_lines, lon_lines : array or None
Locations at which to draw latitude and longitude lines.
None will use default values which are resonable for maps of
North America.
projection : cartopy.crs class
Map projection supported by cartopy. Used for all subsequent calls
to the GeoAxes object generated. Defaults to LambertConformal
centered on radar.
min_lat, max_lat, min_lon, max_lon : float
Latitude and longitude ranges for the map projection region in
degrees.
width, height : float
Width and height of map domain in meters.
Only this set of parameters or the previous set of parameters
(min_lat, max_lat, min_lon, max_lon) should be specified.
If neither set is specified then the map domain will be determined
from the extend of the radar gate locations.
shapefile : str
Filename for a shapefile to add to map.
shapefile_kwargs : dict
Key word arguments used to format shapefile. Projection defaults
to lat lon (cartopy.crs.PlateCarree())
resolution : '10m', '50m', '110m'.
Resolution of NaturalEarthFeatures to use. See Cartopy
documentation for details.
gatefilter : GateFilter
GateFilter instance. None will result in no gatefilter mask being
applied to data.
filter_transitions : bool
True to remove rays where the antenna was in transition between
sweeps from the plot. False will include these rays in the plot.
No rays are filtered when the antenna_transition attribute of the
underlying radar is not present.
edges : bool
True will interpolate and extrapolate the gate edges from the
range, azimuth and elevations in the radar, treating these
as specifying the center of each gate. False treats these
coordinates themselved as the gate edges, resulting in a plot
in which the last gate in each ray and the entire last ray are not
not plotted.
embellish: bool
True by default. Set to False to supress drawing of coastlines
etc.. Use for speedup when specifying shapefiles.
add_grid_lines : bool
True by default. Set to False to supress drawing of lat/lon lines
Note that lat lon labels only work with certain projections.
raster : bool
False by default. Set to true to render the display as a raster
rather than a vector in call to pcolormesh. Saves time in plotting
high resolution data over large areas. Be sure to set the dpi
of the plot for your application if you save it as a vector format
(i.e., pdf, eps, svg).
alpha : float or None
Set the alpha tranparency of the radar plot. Useful for
overplotting radar over other datasets.
edgecolor : str
Set the behavior of the edges of the pixels, by default
it will color them the same as the pixels (faces).
**kwargs : additional keyword arguments to pass to pcolormesh.
File: /opt/conda/lib/python3.11/site-packages/pyart/graph/radarmapdisplay.py
Type: methodOr, let’s view a different elevation scan! To do this, change the sweep parameter in the plot_ppi_map function.
fig = plt.figure(figsize=[12, 12])
display = pyart.graph.RadarMapDisplay(radar)
display.plot_ppi_map(
"uncorrected_reflectivity_h",
sweep=0,
vmin=-20,
vmax=60,
projection=ccrs.PlateCarree(),
cmap="Carbone42",
)
plt.show()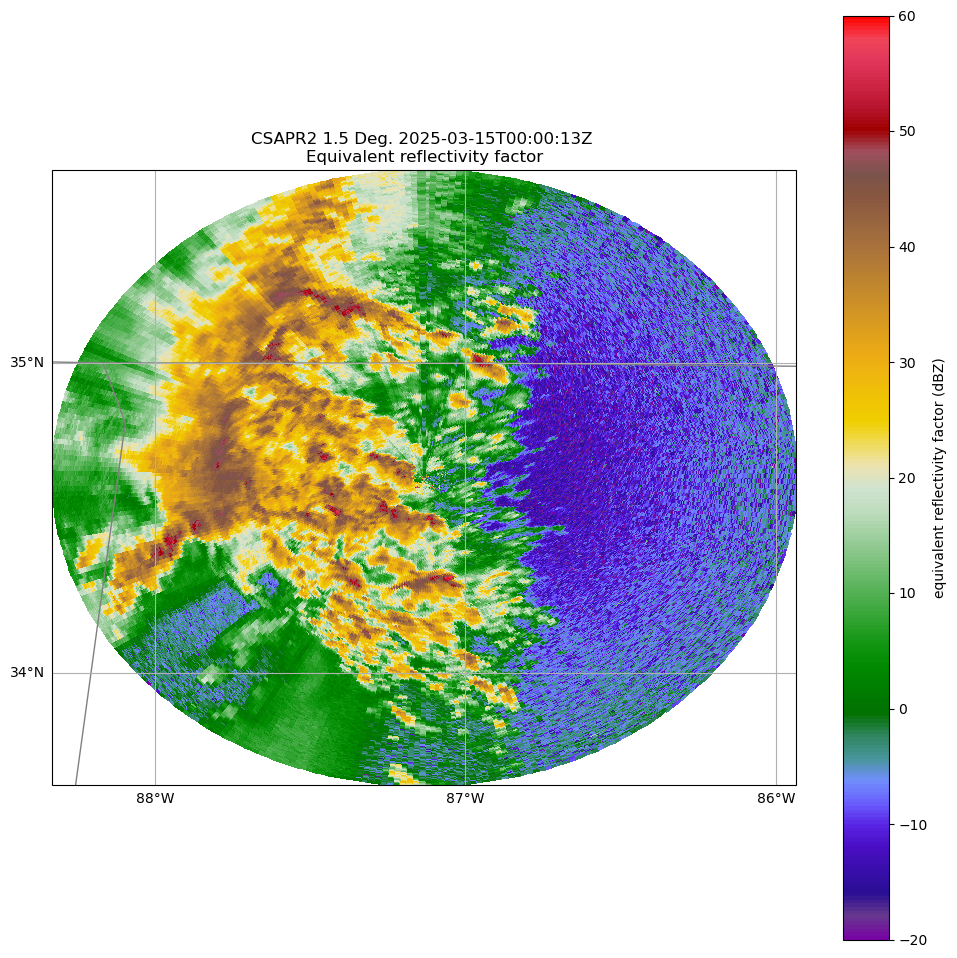
Gridding with Py-ART¶
Gridding is an important workflow to understand when working with radar data! Here, we walk through the steps required.
Antenna vs. Cartesian Coordinates¶
Radar data, by default, is stored in a polar (or antenna) coordinate system, with the data coordinates stored as an angle (ranging from 0 to 360 degrees with 0 == North), and a radius from the radar, and an elevation which is the angle between the ground and the ground.
This format can be challenging to plot, since it is scan/radar specific. Also, it can make comparing with model data, which is on a lat/lon grid, challenging since one would need to transform the model daa cartesian coordinates to polar/antenna coordiantes.
Fortunately, PyART has a variety of gridding routines, which can be used to grid your data to a Cartesian grid. Once it is in this new grid, one can easily slice/dice the dataset, and compare to other data sources.
Why is Gridding Important?¶
Gridding is essential to combining multiple data sources (ex. multiple radars), and comparing to other data sources (ex. model data). There are also decisions that are made during the gridding process that have a large impact on the regridded data - for example:
What resolution should my grid be?
Which interpolation routine should I use?
How smooth should my interpolated data be?
While there is not always a right or wrong answer, it is important to understand the options available, and document which routine you used with your data! Also - experiment with different options and choose the best for your use case!
The Grid Object¶
We can transform our data into this grid object, from the radars, using pyart.map.grid_from_radars().
Beforing gridding our data, we need to make a decision about the desired grid resolution and extent. For example, one might imagine a grid configuration of:
Grid extent/limits
20 km in the x-direction (north/south)
20 km in the y-direction (west/east)
15 km in the z-direction (vertical)
500 m spatial resolution
The pyart.map.grid_from_radars() function takes the grid shape and grid limits as input, with the order (z, y, x).
Let’s setup our configuration, setting our grid extent first, with the distance measured in meters
z_grid_limits = (500.,15_000.)
y_grid_limits = (-30_000.,30_000.)
x_grid_limits = (-30_000.,30_000.)Now that we have our grid limits, we can set our desired resolution (again, in meters)
grid_resolution = 500Let’s compute our grid shape - using the extent and resolution to compute the number of grid points in each direction.
def compute_number_of_points(extent, resolution):
return int((extent[1] - extent[0])/resolution)Now that we have a helper function to compute this, let’s apply it to our vertical dimension
z_grid_points = compute_number_of_points(z_grid_limits, grid_resolution)
z_grid_points29We can apply this to the horizontal (x, y) dimensions as well.
x_grid_points = compute_number_of_points(x_grid_limits, grid_resolution)
y_grid_points = compute_number_of_points(y_grid_limits, grid_resolution)
print(z_grid_points,
y_grid_points,
x_grid_points)29 120 120
Use our configuration to grid the data!¶
Now that we have the grid shape and grid limits, let’s grid up our radar!
grid = pyart.map.grid_from_radars([radar],
grid_shape=(z_grid_points,
y_grid_points,
x_grid_points),
grid_limits=(z_grid_limits,
y_grid_limits,
x_grid_limits),
)
grid<pyart.core.grid.Grid at 0x7f2488db3250>Plot the Grid Object¶
Plot a horizontal view of the data¶
We can use the GridMapDisplay from pyart.graph to visualize our regridded data, starting with a horizontal view (slice along a single vertical level)
display = pyart.graph.GridMapDisplay(grid)
display.plot_grid('uncorrected_reflectivity_h',
level=0,
vmin=-20,
vmax=60,
cmap='HomeyerRainbow')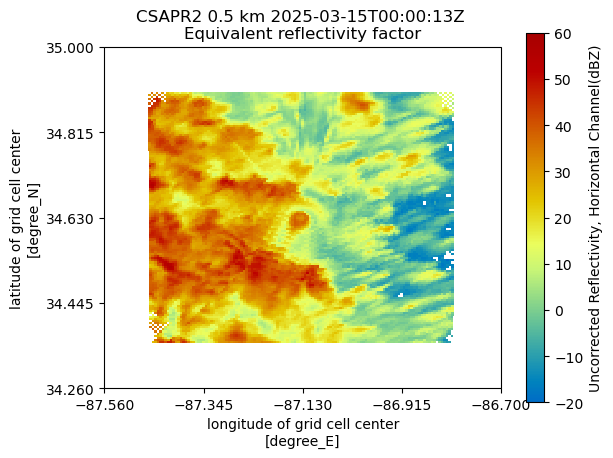
Plot a Latitudinal Slice¶
We can also slice through a single latitude or longitude!
display.plot_latitude_slice('uncorrected_reflectivity_h',
lat=36.5,
vmin=-20,
vmax=60,
cmap='HomeyerRainbow')
plt.xlim([-20, 20]);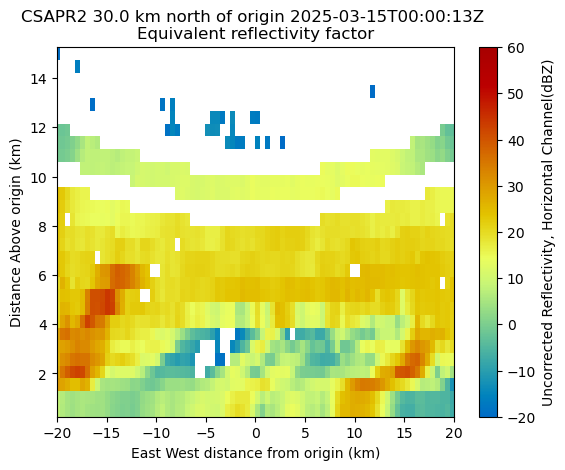
Plot with Xarray¶
Another neat feature of the Grid object is that we can transform it to an xarray.Dataset!
ds = grid.to_xarray()
dsNow, our plotting routine is a one-liner, starting with the horizontal slice:
ds.isel(z=0).uncorrected_reflectivity_h.plot(cmap='HomeyerRainbow',
vmin=-20,
vmax=60);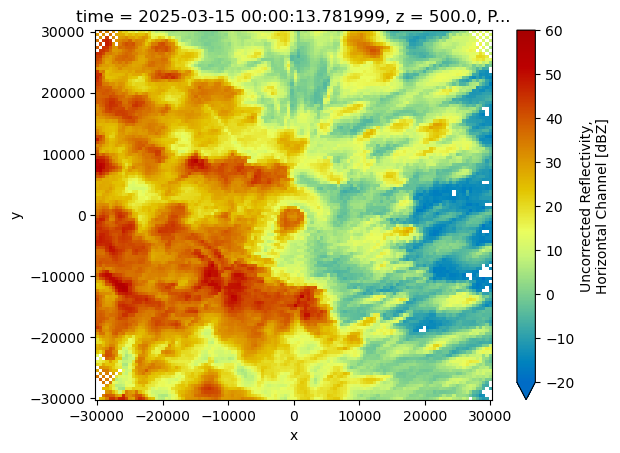
And a vertical slice at a given y dimension (latitude)
ds.sel(y=1300,
method='nearest').uncorrected_reflectivity_h.plot(cmap='HomeyerRainbow',
vmin=-20,
vmax=60);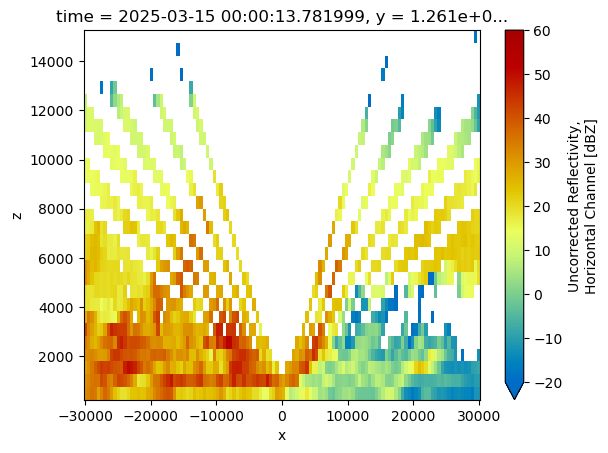
Challenge¶
Find data from last night’s event and plot it up! Feel free to grid, etc.
Hint: the site code is bnf with the instrument being csapr2
Summary¶
Within this notebook, we covered the basics of working with radar data using pyart, including:
Reading in a file using
xradar.ioInvestigating the
xradarobjectVisualizing radar data using the
RadarMapDisplayGridding with Py-ART
Visualizing gridded output
What’s Next¶
In the next few notebooks, we walk through applying data cleaning methods, and advanced visualization methods!
Resources and References¶
Py-ART essentials links: